 | tel. +48 22 753 61 30 | fax +48 22 753 61 35
| tel. +48 22 753 61 30 | fax +48 22 753 61 35
Strona pochodzi z pomocy programu LBX 4.11 do nadzoru klimatu - temperatury, wilgotności, co2, wiatru, ...
Producent urządzeń (termometry, higrometry, barometry, mierniki, rejestratory) oraz oprogramowania do monitoringu parametrów klimatu.
Do pobrania: Program LBX
LAB-EL LB-760A: regulacja PID i procedura samostrojenia
Nastawy regulatora PID
W regulatorze LB-760A poczynając od wersji 7.1 programu ładowalnego, zmieniono sposób wprowadzania i wartości współczynników sterujących procedurami stabilizacji temperatury, wilgotności i stężenia CO2. Obecnie parametry każdego z torów regulacji temperatury i wilgotności są dostrajane przez podanie następujących współczynników, programowanych w ustawieniach zaawansowanych na zakładce "Regulacja":
- Kp – wzmocnienie regulatora, które podaje, jak bardzo sygnał błędu (czyli różnica pomiędzy wartością zadaną a zmierzoną) jest wzmacniany przed podaniem go wyjście regulatora. W praktyce, im będzie mniejsza wydajność układu wykonawczego (np. nagrzewnicy), tym będzie wymagane większe wzmocnienie regulatora. Dokładne dobranie Kp można przeprowadzić przy pomocy procedury samostrojenia. Typowo, wartość tego wzmocnienia zawiera się w przedziale od 10 do 50. Zbyt duża wartość wzmocnienia będzie powodowała silne wahanie sie pomiaru wokół wartości zadanej, a zbyt mała – będzie powodowała "opieszałą" reakcję układu.
- Ti – czas zdwojenia, który podaje, z jaką prędkością (czyli w jakim czasie) należy zmieniać sygnał na wyjściu regulatora. Jeżeli czas ten (przykładowo) zwiększymy dwukrotnie, to regulator będzie zmieniał dwa razy wolniej sygnał na wyjściu związanym z tym współczynnikiem. W pierwszym przybliżeniu, czas zdwojenia jest równy połowie okresu wahania się pomiaru w hali wokół wartości zadanej. Dokładne dobranie Ti można przeprowadzić przy pomocy procedury samostrojenia. Typowo, czas zdwojenia wynosi kilkaset sekund.
- Td – czas wyprzedzenia, który podaje, o ile wcześniej należy ograniczać sygnał wyjściowy regulatora, aby nie doprowadzić do przeregulowania (oscylacji) stabilizowanego parametru (np. temperatury). Dokładne dobranie Td można przeprowadzić przy pomocy procedury samostrojenia. Typowo, czas wyprzedzenia Td powinien być około 4-rokrotnie mniejszy od czasu zdwojenia Ti (około stu sekund).
- OZK – odchyłka zmiany kierunku, po przekroczeniu której następuje zmiana kierunku działania regulatora. Przykładowo, jeżeli regulator grzeje, a różnica pomiędzy temperaturą zmierzona powietrza a zadaną jest większa od OZK dla "Grzania", to regulator przejdzie do trybu stabilizowania temperatury przez chłodzenie. Wartość tych odchyłek nie powinna być zbyt mała (nie mniejsza niż 0,5 °C i 3%), gdyż będzie powodowała zbyt częste przełączanie się pomiędzy przeciwstawnymi kierunkami działania regulatora.
- Odchyłki opóźnione, które wywołują zmianę kierunku działania regulatora przy długotrwałym błędzie. Wartość tych odchyłek powinna być tak dobrana (około 0,2 °C i 1%), aby wystarczająco mały błąd powodował zmianę kierunku działania po upływie wybranego czasu (typowo rzędu 1 godziny = 1800 sekund).
Tor regulacji stężenia CO2 jest dostrajany przez podanie tylko jednego parametru wzmocnienia Kp, który typowo wynosi kilka (około 2). Dokładne dobranie Kp dla CO2 można przeprowadzić przy pomocy procedury samostrojenia.
Samostrojenie
Dokładne dobranie nastaw PID można uzyskać przeprowadzając "Samostrojenie" dla wszystkich pięciu kierunków działania regulatora: grzanie, chłodzenie, nawilżanie, osuszanie i stężenie CO2. Podczas przeprowadzania samostrojenia należy pamiętać, że:
- Przeprowadzenie strojenia jest możliwe tylko dla tej funkcji, która jest aktualnie wykorzystywana do stabilizacji hali. Przykładowo, jeżeli stabilizacja temperatury następuje poprzez grzanie, to nie można wykonać w tym czasie strojenia dla chłodzenia.
- Powinny być zapewnione odpowiednie docelowe wartości temperatur wody gorącej i lodowej.
- Powinny być możliwie stabilne warunki zewnętrzne. Strojenie może być trudne rano, wieczorem, po nagłych opadach deszczu itp.
- Osuszanie przeprowadza się poprzez chłodzenie, co powoduje wykroplenie wody chłodnicą przy temperaturze poniżej punktu rosy, a następnie podgrzewanie powietrza do wymaganej temperatury. W tym przypadku należy więc pozostawić wyjście grzania w trybie sterowania automatycznego tak, by temperatura powietrza w hali była utrzymywana na stałym zadanym poziomie.
- Należy zachować następującą kolejność strojenia: najpierw dla temperatury (grzanie i chłodzenie), a po uzyskaniu stabilnej regulacji temperatury w hali – dopiero dla wilgotności (nawilżanie i osuszanie). Strojenie dla stężenia CO2 można przeprowadzić w dowolnym momencie.
Podczas samostorojenia wykonywane są następujące operacje:
- Przełączenie regulatora w tryb ręczny.
- Oczekiwanie na ustabilizowanie się warunków w hali bez regulacji (na wybranych ustawieniach ręcznych sygnałów wyjściowych).
- Zadanie testowego skoku wartości jednego wybranego sygnału regulacyjnego (np. zwiększenie sygnału grzania).
- Zarejestrowanie reakcji wartości pomiaru w hali (np. temperatury) na ten skok do czasu ponownego ustabilizowania się nowych warunków w hali.
- Obliczenie optymalnych parametrów regulatora na podstawie zebranych pomiarów.
- Akceptacja nastaw (wpisanie ich do regulatora) i przełączenie w tryb regulacji z nowymi parametrami PID.
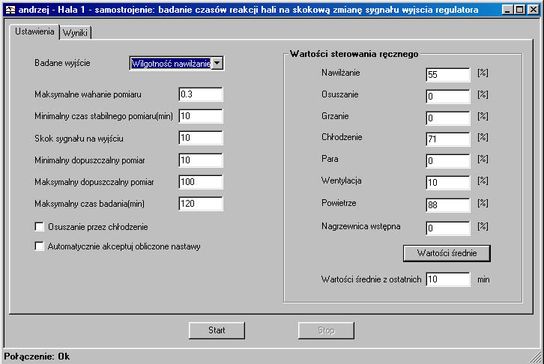
Rozpoczynając samostrojenie należy w zakładce "Ustawienia" dobrać odpowiednie parametry tego eksperymentu, w kolejności:
- Wybrać rodzaj badanego wyjścia.
- Wpisać maksymalne wahanie pomiaru (np. temperatury powietrza) , które jest kryterium oceny ustabilizowaniu się hali (w trybie z regulacja ręczną).
- Wpisać minimalny czas stabilnego pomiaru, podczas którego nie jest przekroczone w/w wahanie.
- Wpisać wartość skoku sygnału na wyjściu, typowo nie mniej niż 10%. Wartość tego skoku powinna być tak dobrana, aby wywołana nim zmiana była co najmniej kilka razy większa od samoistnych wahań tego pomiaru i wpisanego maksymalnego wahania pomiaru.
- Wpisać minimalny i maksymalny pomiar, czyli wartość (np. temperatury powietrza) po przekroczeniu których eksperyment samostrojenia jest przerywany ze względu na zagrożenie hali.
- Wpisać maksymalny czas badania, po którym, jeśli eksperyment się nie uda, to zostanie przerwany i regulator powróci do nastaw z przed eksperymentu.
- Zaznaczyć, czy badanie dotyczy osuszania przez chłodzenie (dotyczy osuszania).
- Zaznaczyć, czy nastawy mają być zaakceptowane automatycznie (przy pierwszych eksperymentach zalecane jest nie zaznaczanie tej opcji).
- Wpisać początkowe wartości sterowania ręcznego, które dla ułatwienia można pobrać z regulatora jako uśrednione za ostatni okres czasu (np. 60 minut).
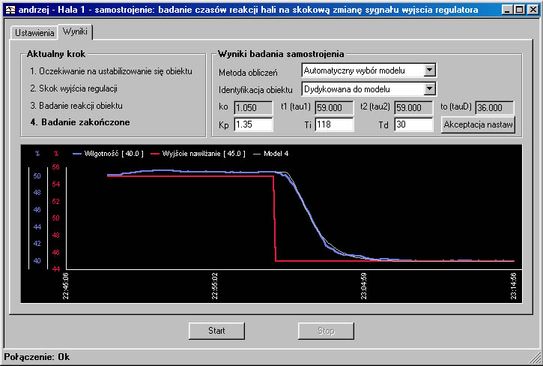
Po dobraniu parametrów uruchamiamy "Start" procedury. Jeżeli program stwierdzi elementarne niezgodności nastaw dla danej sytuacji, to zasygnalizuje to i przerwie procedurę. Większość ustawień procedury samostrojenia jest wstępnie proponowanych przez program. Przebieg procedury samostrojenia jest kontrolowany przez użytkownika na osobnym wykresie na zakładce "Wyniki". Przykładowy wygląd wykresu, informujący o prawidłowym przebiegu eksperymentu, przedstawiono na poniższym rysunku.
Ręczne obliczanie parametrów PID
Dobór parametrów PID regulatora wg powyższej procedury "samostrojenia" program LBX wykonuje samodzielnie (czyli: zmienia trybu pracy: sterowanie ręczne / automatyczne, zbiera wyniki pomiarów, oblicza i wpisuje nastawy PID) przy minimalnym udziale użytkownika. Procedury "automatycznych obliczeń" czasami jednak nie dają dobrych wyników, jeżeli nie są spełnione wszystkie warunki założone podczas ich projektowania (np. występuje zbyt duży wpływ zakłóceń klimatu przez czynniki zewnętrzne w porównaniu z pożądanym wpływem urządzeń wykonawczych). Wtedy obliczenie parametrów PID można dokonać ręcznie na podstawie interpretacji wykresów ilustrujących reakcję hali na skokową zmianę jednego wybranego sygnału wyjściowego regulatora.
Teoretyczne przebiegi zachowania hali w funkcji czasu dla ww. eksperymentu (przeprowadzanego w tzw. "układzie otwartym metodą Zieglera-Nicholsa") przedstawiono na rysunku poniżej, gdzie:
- ΔY – skok sygnału sterującego (np. dla zmiany mocy wyjścia grzania z 30% na 50 % skok wyniesie 50 – 30 = 20%),
- ΔA – zmiana pomiaru w hali wywołana skokiem sygnału sterującego (np. zmiana temperatury w hali),
- d – opóźnienie początku zmiany pomiaru w hali w porównaniu z czasem dokonania skoku (w sekundach),
- τ , Δt – czas trwania zmiany pomiaru w hali (np. czas wzrostu temperatury w hali, w sekundach),
- S – prędkość zmiany (np. w stopniach Celsjusza na sekundę).
Jednostkami pomiarów opisujących odpowiedzi obiektu ΔA są odpowiednio: 1°C, 1% wilgotności względnej i 100ppm stężenia CO2.
Przy wyznaczaniu czasów d, τ lub Δt należy przeprowadzić styczną w punkcie największego nachylania zarejestrowanego pomiaru (np. zmiennej temperatury w hali) tak, jak to przykładowo pokazano na wykresie "a". W przypadku, gdy zachowanie obiektu nie wykazuje stanu ustalonego, należy skorzystać z metody przedstawionej na wykresie "b".
Na tej podstawie można wyznaczyć parametry PID dość bliskie optymalnym (dla grzania, chłodzenia, nawilżania i osuszania), które następnie należy zaprogramować w regulatorze:
- Wzmocnienie regulatora: Kp = ΔY / (d * S)
- Czas zdwojenia regulatora: Ti = 2 * d
- Czas wyprzedzenia regulatora: Td = d / 2
przy czym, jeżeli np. przeprowadzaliśmy eksperyment z grzaniem, to obliczone parametry dotyczą parametrów PID dla grzania itd.
Przykładowo przy badania zachowania grzania: jeżeli dla skoku wyjścia grzania ΔY = 20% odczytano z wykresu temperatury wartości: d = 60 sekund, τ = 120 sekund i ΔA = 5°C, to obliczone parametry PID dla grzania wyniosą:
- Wzmocnienie regulatora: Kp = 20 * 120 / (60 * 5) = 8
- Czas zdwojenia regulatora: Ti = 2 * 60 = 120
- Czas wyprzedzenia regulatora: Td = 60 / 2 = 30
Teoretyczne przebiegi podczas eksperymentu strojenia w układzie otwartym metodą Zieglera-Nicholsa.
Dla eksperymentu z regulacją stężenia CO2 wyznacza się tylko wzmocnienie regulatora: Kp = ΔY / ΔA. W tym przypadku w tryb sterowania ręcznego należy przełączyć tylko wyjścia wentylacji i powietrza (sterowanie klapą dopływu świeżego powietrza), pozostawiając pozostałe wyjścia regulatora w trybie automatycznym. Wywołanie testowego skoku wartości sygnału wyjściowego polega na zmianie wyjścia sterowania powietrzem (czyli zmianie położenia przepustnic powietrza w komorze mieszania).
Przykładowo dla CO2: dla skoku wyjścia powietrza o ΔY = 15% i wywołanej tym zmiany mierzonego stężenia o:
ΔA = 1000ppm = 10 * 100ppm, obliczone wzmocnienie regulatora wyniesie: Kp = ΔY / ΔA = 15 / 10 = 1,5.
Po zaprogramowaniu czasów Ti i Td dalszą korektę regulacji (dla uzyskania lepszej pracy regulatora – czyli stabilniejszego zachowania wyjść regulatora) należy wykonywać poprzez stopniowa zmianę wzmocnienia Kp regulatora co +/-10%. W przypadku występowania dużych wahań sygnałów wyjściowych regulatora - należy zwykle zmniejszyć wzmocnienie Kp dla tej funkcji, której oscylacja dotyczy. Należy też zwrócić uwagę na fakt, że niestabilna temperatura będzie wywoływała niestabilną wilgotność w hali (zmiana o 1°C przekłada się na zmianę wilgotności względnej powietrza o około 6%), dlatego regulację należy rozpocząć od temperatury.
Zalecane wartości pozostałych pomocniczych nastaw towarzyszących parametrom PID w zakładce Regulacja są następujące:
- dla temperatury:
- dla grzania i chłodzenia: odchyłka zmiany kierunku (OZK) = 1,5°C
- odchyłka zmiany kierunku przy długotrwałym błędzie = 0,2°C
- dla wilgotności:
- dla nawilżania i osuszania: odchyłka zmiany kierunku (OZK) = 5%,
- odchyłka zmiany kierunku przy długotrwałym błędzie = 0,5%,
- czas długotrwałego błędu = 1800 sekund.
NIE NALEŻY USTAWIAĆ TYCH ODCHYŁEK NA WARTOŚCI ZBYT MAŁE - gdyż zwiększą się oscylacje danego parametru (temperatury czy wilgotności), pogorszy się jakość regulacji, a dodatkowo zbyt często będą się naprzemiennie włączać urządzenia od zmniejszania i zwiększania danego parametru.